
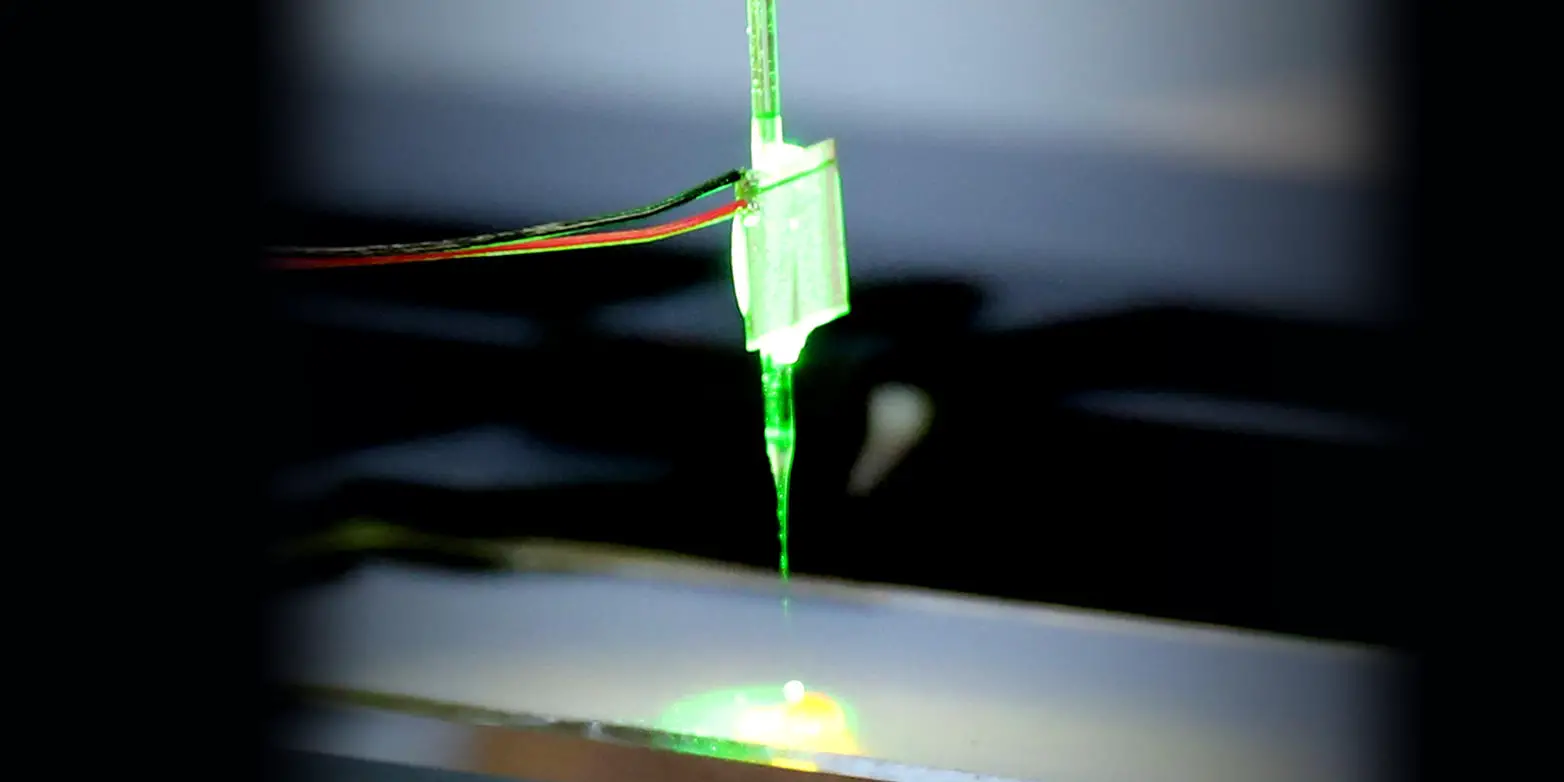
Usando una aguja de vidrio hecha para oscilar con la ayuda de ultrasonido, se pueden manipular líquidos y atrapar partículas. Crédito: ETH Zúrich
La mayoría de nosotros estamos familiarizados con los robots que tienen brazos móviles. Estas máquinas se encuentran comúnmente en entornos de fábrica y son capaces de realizar una variedad de tareas mecánicas. Se pueden programar para realizar una variedad de funciones y un solo robot puede realizar múltiples tareas.
Hasta ahora, los robots equipados con brazos móviles han tenido conexiones limitadas con sistemas de microfluidos que transportan pequeñas cantidades de líquido a través de delicados capilares. Estos sistemas, conocidos como microfluidos o lab-on-a-chip, fueron creados por investigadores para ayudar en el análisis de laboratorio y, por lo general, dependen de bombas externas para hacer circular el líquido a través de los chips. Sin embargo, la automatización de estos sistemas ha sido un desafío y los chips deben diseñarse y fabricarse a medida para cada aplicación individual.
Oscilaciones de la aguja de ultrasonido
Los científicos dirigidos por el profesor de ETH Daniel Ahmed ahora están combinando la robótica convencional y la microfluídica. Han desarrollado un dispositivo que utiliza ultrasonido y se puede acoplar a un brazo robótico. Es adecuado para realizar una amplia gama de tareas en aplicaciones microrobóticas y microfluídicas y también se puede utilizar para automatizar dichas aplicaciones. Los científicos informaron este desarrollo en Nature Communications.
El dispositivo comprende una aguja de vidrio fina y puntiaguda y un transductor piezoeléctrico que hace que la aguja oscile. Se utilizan transductores similares en altavoces, imágenes de ultrasonido y equipos profesionales de limpieza dental. Los investigadores de ETH pueden variar la frecuencia de oscilación de sus agujas de vidrio. Al sumergir la aguja en un líquido, crean un patrón tridimensional formado por múltiples vórtices. Dado que este patrón depende de la frecuencia de oscilación, se puede controlar en consecuencia.
Los investigadores pudieron usar esto para demostrar varias aplicaciones. Primero, lograron mezclar pequeñas gotas de líquidos altamente viscosos. “Cuanto más viscosos son los líquidos, más difícil es mezclarlos”, explica el profesor Ahmed. “Sin embargo, nuestro método logra hacer esto porque nos permite no solo crear un solo vórtice, sino también mezclar de manera eficiente los líquidos usando un patrón tridimensional complejo compuesto por varios vórtices fuertes”.
En segundo lugar, los científicos pudieron bombear fluidos a través de un sistema de minicanales creando un patrón específico de vórtices y colocando la aguja de vidrio oscilante cerca de la pared del canal.
En tercer lugar, pudieron usar su dispositivo acústico asistido por robot para capturar partículas finas presentes en el fluido. Esto funciona porque el tamaño de una partícula determina su reacción a las ondas sonoras. Las partículas relativamente grandes se mueven hacia la aguja de vidrio oscilante, donde se acumulan. Los investigadores demostraron cómo este método puede capturar no solo partículas inanimadas, sino también embriones de peces. Creen que también debería poder capturar células biológicas en el fluido. “En el pasado, manipular partículas microscópicas en tres dimensiones siempre ha sido un desafío. Nuestro brazo microrobótico lo hace fácil”, dice Ahmed.
“Hasta ahora, los avances en las grandes aplicaciones convencionales de robótica y microfluidos se hacían por separado”, dice Ahmed. “Nuestro trabajo ayuda a unir los dos enfoques”. Como resultado, los futuros sistemas de microfluidos pueden diseñarse de manera similar a los sistemas robóticos actuales. Un solo dispositivo debidamente programado sería capaz de manejar una variedad de tareas. “Mezclar y bombear líquidos y capturar partículas: podemos hacerlo todo con un solo dispositivo”, dice Ahmed. Esto significa que los chips microfluídicos del mañana ya no tendrán que fabricarse a medida para cada aplicación específica. A los investigadores les gustaría combinar varias agujas de vidrio para crear patrones de vórtice aún más complejos en líquidos.
Además del análisis de laboratorio, Ahmed puede imaginar otras aplicaciones para los brazos microrobóticos, como la clasificación de objetos diminutos. Los brazos también podrían usarse en biotecnología como una forma de introducir ADN en células individuales. En última instancia, debería ser posible emplearlos en la fabricación aditiva y la impresión 3D.
Referencia: «Un efector final acustofluídico asistido por robot» por Jan Durrer, Prajwal Agrawal, Ali Ozgul, Stephan CF Neuhauss, Nitesh Nama y Daniel Ahmed, 26 de octubre de 2022, Nature Communications.
DOI: 10.1038/s41467-022-34167-a






{kind=link}